羅中泉 實驗室 研究計畫 |
我們研究室主要的研究主題,是利用電腦模擬神經系統中的生物資訊及綜合性的行為。與其他模擬實驗相比,我們有兩個較獨特的地方:
| (1) | 實驗所使用的大規模神經網路中,模擬的神經具有仿真、詳細的膜電位變化及神經突觸的動態反應。 |
| (2) | 在分析資料時我們使用專為神經系統設計的新型統計工具。此外,我們的模擬測試都與從事相關生理實驗的專家有密切的合作。 |
我們實驗室也和仿神經形態工程學的工程師合作,目的是將我們在神經系統中所學習到的知識,轉譯成工程系統的設計。
我們主要的研究簡介如下:
(1)神經生物資訊學及電腦計算模型研究
(研究合作夥伴:國立清華大學腦科學研究中心)
- 果蠅的嗅覺區域神經迴路
- 果蠅全腦模擬: Flysim 系統
- 果蠅中央複合體的模型建構
從演化的觀點來看,嗅覺神經系統相較於聽覺或者視覺神經系統,可謂是最為古老的感官系統。然而目前對於嗅覺系統的認識卻是最為有限的。不過近年已開始有愈來愈多的研究者加入研究如何靈敏的偵測氣味分子。
我們在嗅覺神經系統的研究分為兩個部分─天線體(antennal lobe)、蕈狀體(mushroom body):
| 1) | 我們分析江安世老師在FlyCircuit資料庫提供的高解析度的果蠅嗅覺神經系統解剖螢光影像,發現若干以目前理論無法解釋的網路規則。因此我們依據FlyCircuit資料建構神經系統網路模型,執行嗅覺系統模擬與分析,設法解釋果蠅的天線體嗅覺神經系統運作方式。[Kao & Lo, 2020] |

果蠅天線體示意圖 | |
| 2) | 嗅覺訊號的編碼以及解碼對於學習和形成連結式的記憶是很重要的,因此我們結合Janelia Farm發表的FlyEM資料庫的果蠅全腦電子顯微術影像和清大腦科學中心提供的FlyCircuit資料庫的螢光影像,分析嗅覺投射神經元從天線體到蕈狀體的和下游峽谷細胞的連結規則,探討不同網路結構對嗅覺訊息編碼和解碼的影響。此外我們也建立了蕈狀體的脈衝神經網路進行模擬。 |

果蠅嗅覺神經迴路 | |
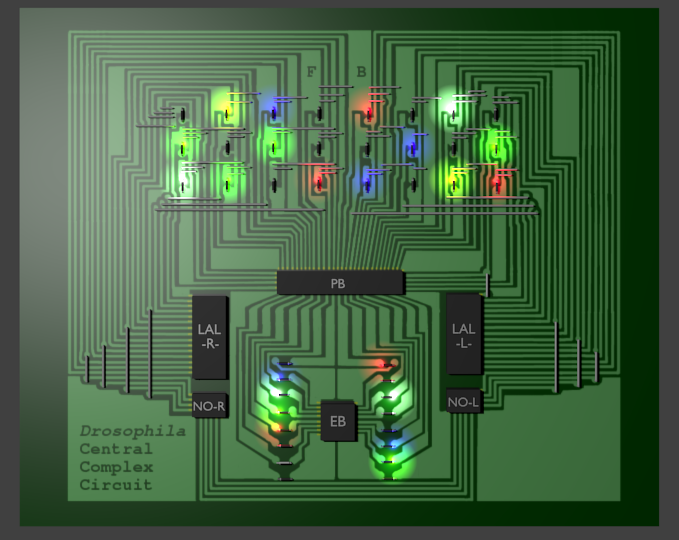
| 為了建立一個能將 高解析度的果蠅神經數據庫 轉換至 細胞及突觸尺度的全腦神經網路模型 的平台。我們已經建立了此平台的基本設施,並將最新的 Flycircuit 數據庫轉換至可見的實況脈衝神經網路模型。 [Huang & Wang et al, 2019] |

果蠅全腦模擬 |
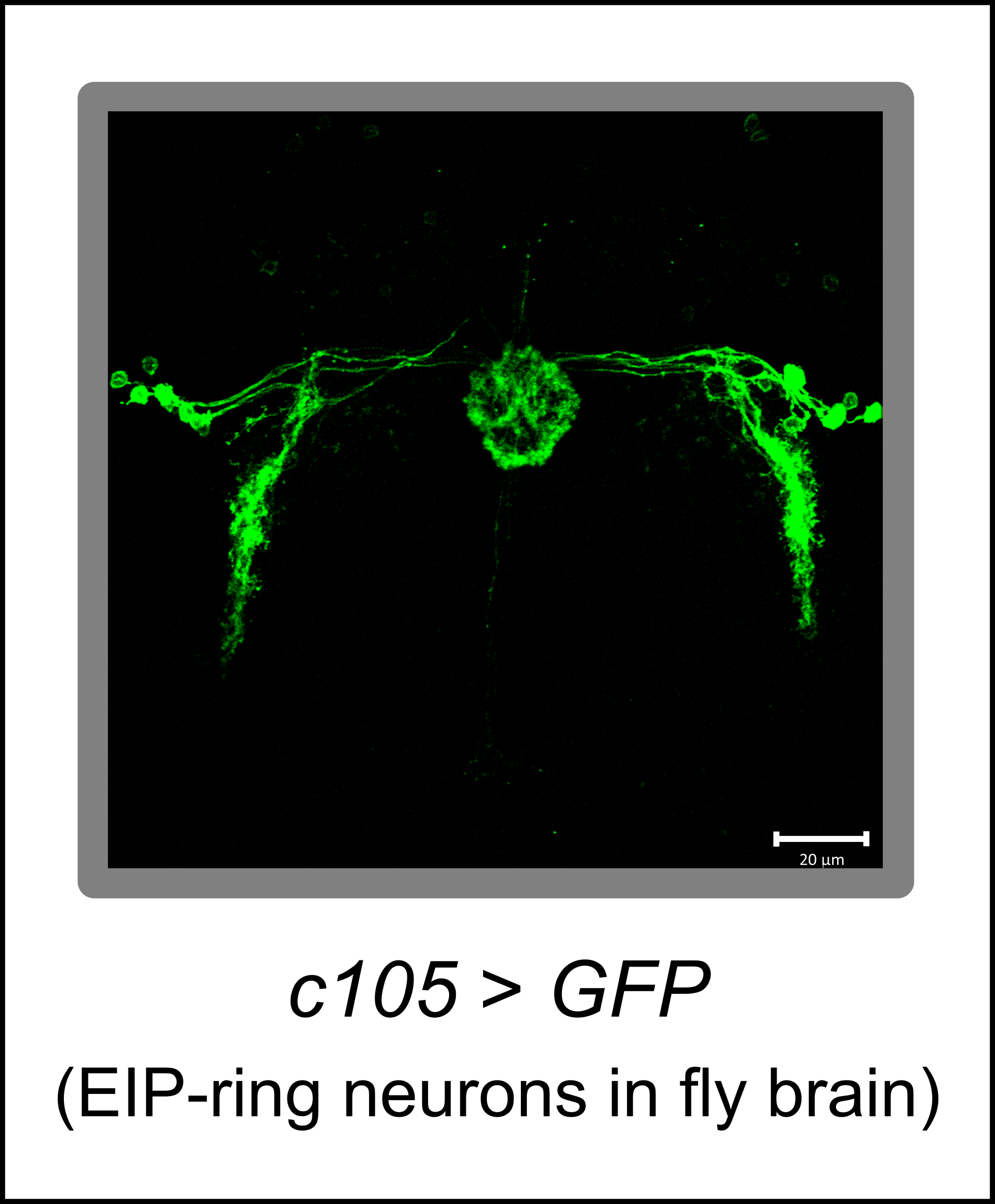
| 為了在複雜的自然環境中穿梭,動物需要知道所處位置與前進方向等重要資訊。在大多數的昆蟲腦中,皆有一個高度結構化的構造,肩負起編碼頭部朝向和控制行走的任務,此結構為中央複合體。我們想了解中央複合體如何運作,因此分析了此處的神經網路連結,並發現可用簡單的數學規則來描述此架構。[Chang et al, 2017]
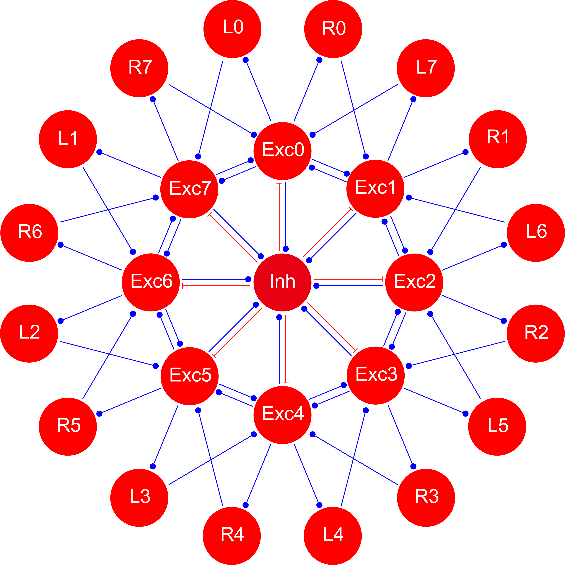
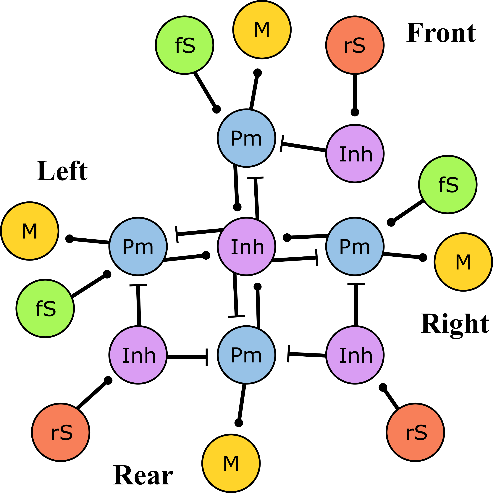
再加上由其他實驗室發表的神經體資料,我們建立了果蠅中央複合體中前橋腦和橢球體,兩個腦區的脈衝神經網路模型[Su et al, 2017],此模型有兩個主要的組成元件,其一為對稱迴路,在果蠅靜止或直走時幫助維持空間記憶,另一者為不對稱迴路,可用來在身體旋轉時更新記憶。除此之外,我們也同時進行果蠅行為實驗以驗證並改進模型,藉由發展理論模型和設計相應實驗,我們將能了解果蠅更高階的行為模式,包括決策判斷以及空間知覺。 |

中央複合體中前橋腦-橢球體模型的對稱迴路(左圖)及不對稱迴路(右圖)。(圖片修改自 [Su et al, 2017]) |
(2)神經功能實驗
- 空間方向感工作記憶
- 果蠅的虛擬實境
| 我們研究了中央複合體及其相關神經元在果蠅空間定位記憶當中的作用。在這裡,我們測試了當視覺刺激消失之後,果蠅是否會記得先前的位置。[Yen et al, 2019][Han et al, 2021] 接下來,我們改變了中央複合體中神經元的活性來觀察在行為上果蠅會有怎樣的變化。最後,我們透過行為實驗來驗證計算機模型[Su et al, 2017] 以及深入了解果蠅空間記憶的內在機制。[Han et al, 2021] |

空間定位記憶任務 |
| 虛擬實境設置一直以來被廣泛的運用在果蠅的行為研究。問題是這類實驗儀器對果蠅的真實程度到底有多高。為了瞭解真相,我們建立一套專門給果蠅的虛擬環境。在實驗環境中,被固定的果蠅在浮球上行走,而浮球是被精密的氣流控制。透過浮球旋轉的狀況能計算出果蠅的行走模式。我們會比較果蠅在這套行為儀器和自由行動的移動模式。未來我們更會透過這套儀器去研究果蠅的導航行為。 |

果蠅虛擬環境 |
(3)神經迴路如何造成腦部如此富有彈性的決策功能
|
和AI相比之下,我們的大腦具有一個明顯的優勢:大腦能輕鬆的學習新的訊息。未知或新穎的訊號通常會打亂AI的運作,然而處理新資訊卻是生物體每天都會面臨並且解決的問題。我們把這個能夠應對多種資訊的能力稱為靈活性 (flexibility)。我們實驗室想要回答的問題是:為什麼我們的神經系統能夠如此靈活? 我們主要的假說如下:相較於深賴連接權重數值 (synaptic weight) 的傳統深度神經網路 (DNN) 而言,擁有回饋機制 (recurrent structure) 的真實神經網路會更加靈活。遞迴神經網路 (recurrent neural network) 能夠在維持相同的連接權重之下執行許多不同任務。在分析果蠅大腦的連結架構後,我們發現某些特定的小單元結構 (motifs) 出現的機率遠高於在隨機的神經網路中會出現的機率。我們實驗室用動態系統來分析小的神經網路究竟是如何靈活的執行各種不同任務,並且藉由研究這些數學模型來控制網路來執行不同任務。[Liu et al, preprints] 我們的研究對於未來設計神經晶片 (neuromorphic chip) 也許會有所貢獻。 |

CRIREL的零增長等值線 |
(4)仿神經形態工程學
(研究合作夥伴:嵌入式仿神經人工智慧晶片團隊)
媒體報導:2020年,2021年
- 以果蠅視覺神經系統為基礎之距離偵測演算法
- 仿果蠅視覺神經系統光流演算法
- 無人載具之仿生控制
| 障礙物偵測乃無人載具的必要技術,而距離/深度估計演算法則是障礙物偵測的核心。距離估計可以分成主被動訊號兩種主要方法。在主動訊號距離偵測上可以使用聲納、無線電波例如雷達跟光達。而在被動距離偵測上需要的是影像資訊,這也是大部分動物仰賴的導航方法。從果蠅視覺系統發想,我們開發出輕量化整合影像光流與相機本體資訊之距離偵測演算法。此演算法有著較輕計算量也因此容易移植到小型計算平台例如Raspberry PI,而其計算速度可以超過100FPS。此演算法也可以移植到神經網路並在仿神經晶片上執行。 |

此演算法之距離估計 |
| 藉由光流技術可以獲取相機本體的移動或者環境物件中的位移,大部分的光流技術都需要大量的計算資源來取得精準的光流資訊,例如反矩陣或者迭代計算。我們從果蠅視覺系統以及經典Reichardt模型為基礎,設計出時間-空間濾波Reichardt模型去計算光流。此模型使用卷積跟時間濾波計算光流也因為其訊號架構為單純前饋傳遞,因此容易移植到電子電路上。此模型為我們仿神經障礙物偵測系統之前級光流處理器。 |

時間-空間濾波Reichardt模型 |
| 現代機器人多倚賴複雜演算法或機器學習,以執行特定任務。然而我們可以看到,動物可以在複雜環境中同步執行導航、規劃、探索等多項任務,這暗示著「仿生」科技可能成為下一世代機器人的共同特徵。我們實驗室從先前發表的果蠅中央複合體(central complex)模型出發,將其實現在一小型自走車FlyintelBot [Yao et al, 2019] 上,自走車於一個圓形圍欄中,能自由探索並形成空間記憶。目前我們的研究重心轉移至運用脈衝式神經網路(SNN)控制無人飛行器的飛行。 | |
 圓形圍欄中的自走車
圓形圍欄中的自走車
|
 自製無人飛行器
自製無人飛行器
|
(5)Agent-based 疾病模擬器
(研究合作夥伴:張筱涵老師)
| 由人際交流形成的疾病傳播和神經網路中的訊號傳遞在概念和形式上皆有相似之處。此研究透過建立agent-based模型來模擬疾病的傳播。相較於傳統的疾病傳播模型多以群體去模擬,agent-based模型則以個體為基礎去進行模擬,這使得我們能夠詳細地去設定每個個體間不同的狀態並且進行交流。在模型中,我們將agent-based模型結合傳統的SIR模型,希望能夠模擬出個體不同階段的健康狀態,同時每個個體將有獨特的年齡、職業、身份,還有根據其身份而產生的日常行為以及人群交流。為了詳細的模擬出人群日常中的移動,我們建立了一個可以用於模擬小城市或是學校中的人流移動的地圖,使得在疾病的傳播模擬上能夠更加的擬真。 |

疾病模擬的社區地圖 |
關於我們的過往研究,請參考這裡。